Lei Zhang
Google Scholar
Github
Linkedin
X/Twitter
Email: zhanglei dot cn dot de at gmail dot com
Dexterous Robotic Manipulation; Computer Vision; Deep Learning; Reinforcement Learning
Education:
University of Hamburg (UHH, Germany) | 4th year Ph.D. Candidate
Leibniz Universität Hannover (LUH, Germany) | M.Sc., Sep. 2017 - Mar. 2020
Harbin Institute of Technology (HIT, China) | B.Sc., Sep. 2012 - June. 2016
FUNCanon: Learning Pose-Aware Action Primitives via Functional Object Canonicalization for Generalizable Robotic Manipulation
Under Review, 2025
Hongli Xu, Lei Zhang*, Xiaoyue Hu, Boyang Zhong, Kaixin Bai, Zoltán-Csaba Márton, Zhenshan Bing, Zhaopeng Chen, Alois Christian Knoll, Jianwei Zhang
Keywords: Functional Object Canonicalization, Sim2Real Transfer, Diffusion Policy.
Webpage •
ArXiv •
Code (Coming Soon)
M4Diffuser: Multi-View Diffusion Policy with Manipulability-Aware Control for Robust Mobile Manipulation
Under Review, 2025
Ju Dong, Lei Zhang*, Liding Zhang, Yao Ling, Yu Fu, Kaixin Bai, Zoltán-Csaba Márton, Zhenshan Bing, Zhaopeng Chen, Alois Christian Knoll, Jianwei Zhang
Keywords: Mobile Manipulation, Diffusion Policy.
Webpage •
ArXiv •
StereoAnything: Advanced Zero-Shot Stereo Imaging for Multi-Finger Grasp Detection with Transparent Objects
Under Review, 2025
Kaixin Bai, Lei Zhang*, Yiwen Liu, Zhaopeng Chen, Jianwei Zhang
Keywords: Stereo Perception, Transparent Object Perception, Multi-Fingered Robot Grasping.
Webpage •
TechRxiv •
Dataset (Coming Soon)
Don't Let Your Robot be Harmful: Responsible Robotic Manipulation via Safety-as-Policy
RAL, 2025
Minheng Ni, Lei Zhang, Zihan Chen, Kaixin Bai, Zhaopeng Chen, Jianwei Zhang, Lei Zhang, Wangmeng Zuo
Keywords: Multi-Modal Large Language Model, Responsible Robotic Manipulation.
Webpage •
ArXiv •
PDF •
Demo •
Dataset
DORA: Object Affordance-Guided Reinforcement Learning for Dexterous Robotic Manipulation
IEEE CBS 2025
Lei Zhang, Soumya Mondal, Zhenshan Bing, Kaixin Bai, Diwen Zheng, Zhaopeng Chen, Alois Christian Knoll, Jianwei Zhang
Keywords: Dexterous Manipulation, RL, Object Affordance, Multi-Fingered Robot Hand.
Webpage •
ArXiv •
ContactDexNet: Multi-fingered Robotic Hand Grasping in Cluttered Environments through Hand-object Contact Semantic Mapping
2025 IEEE International Conference on Intelligent Robots and Systems (IROS2025)
Lei Zhang, Kaixin Bai, Guowen Huang, Zhenshan Bing, Zhaopeng Chen, Alois Knoll, Jianwei Zhang
Keywords: Generation Model, Multi-fingered Robotic Hand, Grasping from Clutter Scenes.
Webpage •
ArXiv •
GitHub •
Demo •
Multi-Modal FFH Grasping Dataset
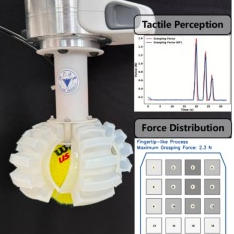
Towards reliable and damage-less robotic fragile fruit grasping: An enveloping gripper with multimodal strategy inspired by Asian elephant trunk
Computers and Electronics in Agriculture | Journal (2025)
Qingyu Wang, Kaixin Bai, Lei Zhang, Zhizhong Sun, Tianze Jia, Dong Hu, Qiang Li, Jianwei Zhang, Alois Knoll, Huanyu Jiang, Mingchuan Zhou, Yibin Ying
Keywords: Fragile Object Grasping, Visuo-tactile perception, Bionic design.
ScienceDirect PDF •
ToolEENet: Tool Affordance 6D Pose Estimation
2024 IEEE International Conference on Intelligent Robots and Systems (IROS2024)
Yunlong Wang, Lei Zhang, Yuyang Tu, Hui Zhang, Kaixin Bai, Zhaopeng Chen, Jianwei Zhang
Keywords: 6D Pose Estimation, Multi-fingered Robotic Hand, Tool Use.
Webpage •
PDF •
Code •
Dataset
CG-CNN: A Collision-Aware Cable Grasping Method in Cluttered Environment
2024 IEEE International Conference on Robotics and Automation (ICRA2024)
Lei Zhang, Kaixin Bai, Qiang Li, Zhaopeng Chen, Jianwei Zhang
Keywords: Collision Awareness; Grasping from Clutter Scenes with Complicated Objects; Sim-to-Real Tranfer.
Webpage •
PDF •
Demo •
Cable Grasping Dataset
Close the Sim2real Gap via Physically-based Structured Light Synthetic Data Simulation
2024 IEEE International Conference on Robotics and Automation (ICRA2024)
Kaixin Bai, Lei Zhang, Zhaopeng Chen, Fang Wan, Jianwei Zhang
Keywords: Structured-light Simulation for Generation of Realistic Data; Data Generation for Perception; Reduce Sim2Real Gap.
Webpage •
PDF •
Demo •
Photorealistic Structured-light Dataset
Towards Precise Model-free Robotic Grasping with Sim-to-Real Transfer Learning
Lei Zhang, Kaixin Bai, Zhaopeng Chen, Yunlei Shi, Jianwei Zhang
2022 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2022).
★ Best Conference Paper Award Finalist, ROBIO ★
Keywords: Data augmentation for Generation of Dense Grasping Labels; Sim-to-Real Transfer; Model-free Grasping Dataset.
Webpage •
PDF •
Demo
Learning of 6D Object Poses with Multi-task Point-wise Regression Deep Networks
Kaixin Bai, Lei Zhang, Zhaopeng Chen, Jianwei Zhang
2022 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2022).
Keywords: Deep Learning-based 6D Pose Estimation; 6D Rotation Representation; 6D Pose Estimation-based Robotic Grasping.
WebPage •
Maximizing the Use of Environmental Constraints: A Pushing-Based Hybrid Position/Force Assembly Skill for Contact-Rich Tasks
Yunlei Shi, Zhaopeng Chen, Lin Cong, Yansong Wu, Martin Craiu-Müller, Chengjie Yuan, Chunyang Chang, Lei Zhang, Jianwei Zhang
2022 IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO 2021).
Keywords: Contact-Rich Assembly; Hybrid Position/Force.
PDF •